Методика моделирования платформы Гью-Стюарта
Учёные БГТУ имени Шухова разработали и запатентовали методику моделирования конструктивных параметров роботизированной платформы подвижности (РПП). Финансирование разработки проводилось в рамках программы «Приоритет-2030».
В чём суть разработки
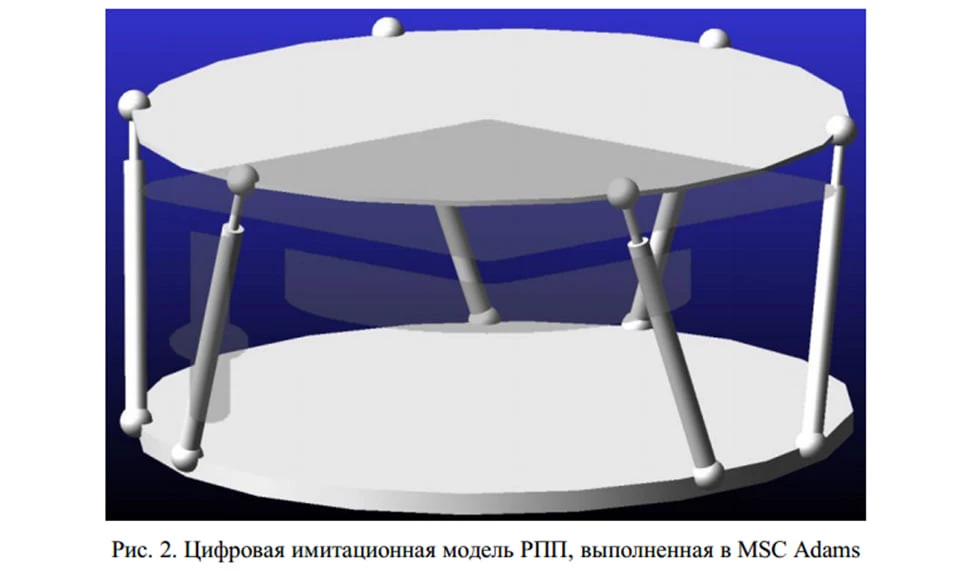
В БГТУ имени Шухова разработали методику моделирования работы механизма параллельной структуры — роботизированной платформы Гью-Стюарта с использованием виртуального прототипа. В программном комплексе MSC Adams построен цифровой макет со свойствами параметризованной имитационной модели. А язык программирования Python использован для создания и итерационного изменения объектов моделирования в Adams. Выбор Python позволил автоматизировать каждый шаг вычислительного эксперимента с помощью специальных процедур и функций, исключая необходимость выполнять манипуляции вручную.
Как возникла идея
В современных отраслях производства всё чаще применяются механизмы с параллельной кинематикой, их особенность — подвижное выходное звено, соединённое с неподвижным основанием несколькими кинематическими цепями, передающими движение параллельно.
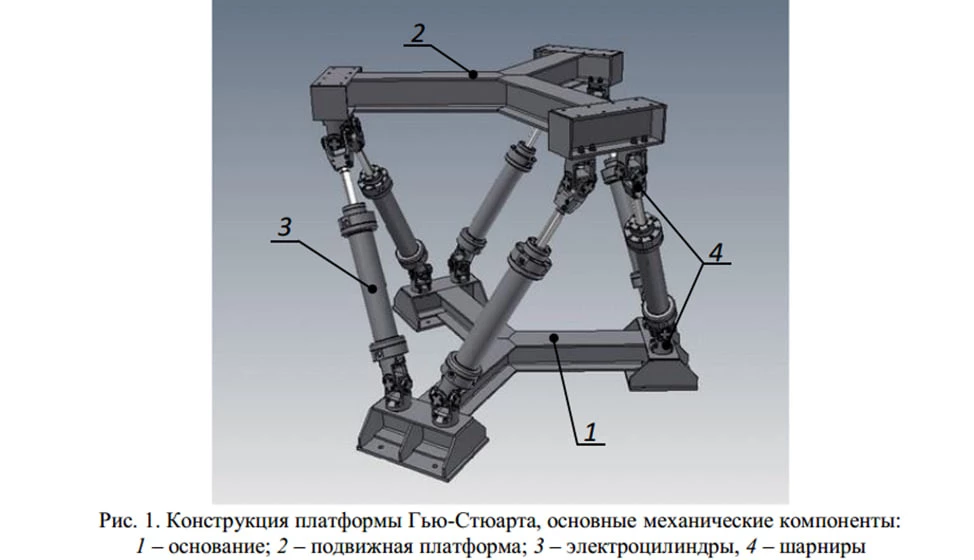
Создание платформы Гью-Стюарта — один из этапов развития механизмов параллельной структуры. Она позволяет перемещать платформы относительно основания по шести независимым координатам с помощью приводов линейных перемещений.
Наряду с преимуществами (способность манипулировать большими нагрузками, повышенная точность перемещения и позиционирования, хорошие динамические характеристики, большие скорости и ускорения, возможность простого масштабирования схемы устройства) платформе присущи и недостатки: сравнительно небольшая рабочая область; наличие положений, в которых происходит потеря управляемости; нелинейная зависимость кинематики и динамики от точки рабочей области; сложность системы управления; возможность интерференции опор, — которые требуют новых методик и предложений по их устранению и снижению негативного влияния на эффективность применения платформы.
Есть ли аналоги
Уникальность предложенной методики заключается в замене ручных манипуляций в программном комплексе MSC Adams автоматизированными программными процедурами, что позволяет сократить трудоёмкость, повысить произвольность процесса и количество возможных вычислительных симуляций.
Кому полезна разработка
Роботизированные подвижные платформы получили широкое применение в машиностроении, медицине, в тренажёрах летательных аппаратов и боевой техники, для ориентации телескопов и антенн. Они открывают дополнительные возможности для решения технических и эксплуатационных задач: испытания высокотехнологичного оборудования и отдельных компонентов, использование в качестве подвижных оснований в симуляторах по управлению техникой. Применение механизмов с параллельной структурой эффективно реализовано в некоторых тренажёрах, имитирующих процессы управления мобильными техническими средствами.
Развитие проекта
Работоспособность разработанной методики была проверена проведённой серией тестовых вычислительных экспериментов. Предложенная методика может применяться для выполнения более сложных задач: исследования динамических параметров в элементах конструкции при движении платформы по сложной траектории с приложенной полезной нагрузкой, определения рабочей зоны, выявления особых положений, сопровождающихся неустойчивой кинематикой и пиковыми нагрузками.
«Разработанная методика позволяет анализировать различные конструктивные исполнения, выдвигать и проверять гипотезы относительно геометрических параметров исследуемой модели, выявлять оптимальные варианты. Представленный подход можно смело применять для модернизации и оптимизации конструктивных элементов роботизированной платформы подвижности, а также при разработке систем управления движением», — отметила Татьяна Дуюн, доктор технических наук, заведующая кафедрой технологии машиностроения БГТУ им. В. Г. Шухова.